 뉴스레터
뉴스레터








실시간으로 모양을 변화시켜 계단이나 바위 등 장애물을 극복할 수 있는 바퀴가 개발됐다. 한국기계연구원은 액체 방울의 표면장력 원리를 모사해 강성이 자유자재로 변하는 모핑 휠을 개발, 실제 이동체에 적용하는 데 성공했다고 2일 밝혔다.
송석현 책임연구원과 박동일 첨단로봇연구센터장 팀이 개발한 모핑 휠은 복잡한 기계 장치나 센서 없이도 표면장력만 변화시켜 강성을 쉽게 바꿀 수 있는 바퀴 시스템이다.
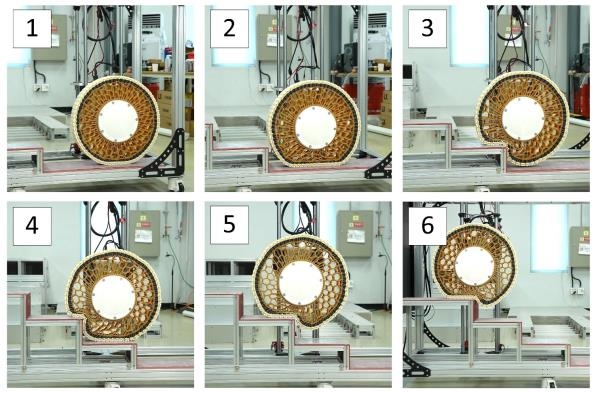
일반 주행 시에는 단단한 원형 바퀴로 작동하다가 장애물을 넘을 때는 바퀴가 말랑해지면서 장애물의 높낮이나 모양에 따라 휠을 자유롭게 변형시킬 수 있다. 기존 기술과 달리 평지 주행 시에도 바퀴에 변형이 일어나지 않으며 소음도 적다,
스마트 체인 블록의 표면장력을 제어하는 와이어 스포크(휠 허브와 휠의 외곽을 연결하는 바큇살)가 휠 허브와 연결돼 있어, 허브 구조가 회전하거나 거리가 변하면 이에 연결된 와이어 스포크 구조가 강하게 당겨지거나 느슨해지면서 스마트 체인 블록의 표면장력이 변화하는 원리다. 이 기술을 적용해 개발된 휠체어 시스템은 바위는 물론 18㎝ 높이의 계단을 오르내릴 수 있으며 휠 지름의 1.3배 높이의 장애물도 넘을 수 있다.
박동일 센터장은 "장애인을 위한 휠체어와 이동 로봇, 탑승형 운송 수단 등으로 다양하게 활용할 수 있을 것"이라고 말했다.
이번 연구 성과는 국제 학술지 '사이언스 로보틱스'(Science Robotics) 지난달 호 표지논문으로 실렸다.
- 연합뉴스
- 저작권자 2024-09-05 ⓒ ScienceTimes
관련기사
